
具体描述
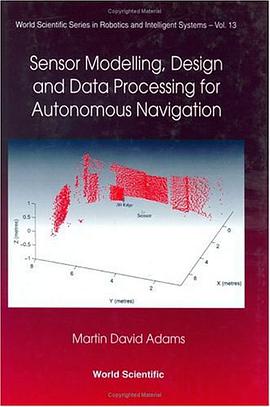
Presents a framework for modelling and using sensors to aid mobile robot navigation. The text addresses the problem of accurate and reliable sensing in confined environments and makes an analysis of the design and construction of a low cost optical range finder. This is followed by a quantitative model for determining the sources and propagation of noise within the sensor. The physics behind the causes of erroneous data is also used to derive a model for detecting and labelling such data as false. In addition, the author's data-processing algorithms are applied to the problem of environmental feature extraction. This forms the basis of a solution to the problem of mobile robot localization. The book develops a relationship between the kinematics of a mobile robot during the execution of successive manoeuvres, and the sensed features. Results, which update a mobile vehicle's position using features from 2D and 3D scans, are presented.
作者简介
目录信息
读后感
评分
评分
评分
评分
用户评价
相关图书
















本站所有内容均为互联网搜索引擎提供的公开搜索信息,本站不存储任何数据与内容,任何内容与数据均与本站无关,如有需要请联系相关搜索引擎包括但不限于百度,google,bing,sogou 等
© 2026 onlinetoolsland.com All Rights Reserved. 本本书屋 版权所有